
Introduction
The double leg squat, in either the loaded or bodyweight form, serves as a common functional exercise used in weight training and rehabilitation settings. Successful execution of the movement requires the coordination and control of numerous muscles, as well as the maintenance of postural stability. Given the dynamic nature and functional demands of the double leg squat, it is often assumed that symmetric control exists between the right and left legs, as evidenced in part by the common approach to only collect unilateral measurements.1,2 Furthermore, it is often postulated that symmetrical kinematics derive from symmetrical force production and symmetrical joint moments during a squat movement.3 However, redundancies present in the neuromuscular system afford the possibility of bilateral asymmetries across different levels of analysis. Thus, caution should be exercised when interpreting the existence of bilateral symmetry, particularly when used to determine exercise prescription on the common assumption that the demand will be equally split between the two extremities.
Bilateral asymmetries have been examined across a variety of motor tasks including countermovement jumps, single leg countermovement jumps and hops, back squat, gait, and upright standing. Similar to evidence found in gait,4 conflicting findings exist on whether bilateral differences are present during the squat movement, and this is evident across multiple levels of analysis (e.g., kinetic – joint torque, ground reaction forces or kinematic measurements). However, few studies have addressed the dynamic balance component (e.g., postural sway) of the squatting movement. Flanagan and Salem5 used a modified center of pressure (COP) variable that was derived as the distance from the ground reaction force (GRF) application point to the ankle joint and showed significantly greater distances for the left lower limb as compared to the right limb across various loading conditions. Using more typical COP measurements, Kohn and colleagues6 reported postural stability measurements as a function of upward gaze direction during squatting and found that a downward, compared to an upward gaze, reduced COP displacements. However, the preceding evidence focuses on a whole-body COP metric and have yet to address the question of whether the maintenance of balance during this dynamic movement is achieved equally from the right and left limbs.
Although limb asymmetry is commonly interpreted as indicative of pathology, evidence from gait analyses suggests that even healthy individuals display asymmetrical behavior.4 In fact, most individuals exhibit a degree of lower limb performance preferences manifested as a strong functional advantage for one limb in asymmetrical tasks.7 Specifically, staggered and tandem standing resulted in increased asymmetrical weight distribution between the legs as compared to a side-by-side posture.8 During locomotion, an asymmetrical second peak of the vertical GRF curve was found and influenced by walking speed while other kinetic properties remained symmetrical.9 Collectively, it is important to understand the contributing factors to limb symmetry and to explore how the body adapts to changes in environmental or tasks constraints that may lead to functional advantages for one of the lower limbs.
Bilateral asymmetries can be calculated using a variety of equations that typically revolve around distinctions like dominant versus nondominant, right versus left, stronger versus weaker, or preferred versus nonpreferred limbs. Additionally, different metrics (e.g., symmetry indices, statistical analysis) have been used to examine the degree of symmetry between the right and left legs. In healthy gait, some investigations analyzed ground reaction forces while others examined spatial-temporal properties of walking and running.4 Additionally, postural control asymmetries have typically been addressed using center of pressure (COP) with evidence of asymmetry found in both static and dynamic balance tasks.8,10,11 Examination of bilateral asymmetries over multiple levels of analysis may provide insight into possible underlying mechanisms that facilitate successful task execution and has the potential to guide practitioners in designing effective training and rehabilitation exercises.
The current investigation explored whether leg asymmetry exists during a bodyweight double leg squat task and assessed the effects of squat speed in a physically active population. First, we examined whether typically used kinetic variables (e.g., vertical ground reaction force – GRFv) demonstrated bilateral asymmetries during the double leg squat.12 A secondary aim addressed the lack of evidence related to postural stability asymmetries by quantifying center-of-pressure (COP) sway of each leg. Increased COP displacements are interpreted as an indication of less postural control and poorer balance performance. Based on the findings of Flanagan and Salem,5 it was predicted that the left leg would exhibit greater COP displacements. Finally, the pace of movement has been shown to influence movement characteristics,9 and we sought to examine whether this pattern of results remained consistent for self-paced and metronome-paced movements during 20 repetitions of the double leg squat task.
Methods
Eighteen physically active young adults (10 F, 23.17 ± 1.72 years, 173.5 ± 10.18 cm, 74.18 ± 16.31 kg) were recruited from a university campus and provided informed consent prior to participation. Participants were considered active if they reported participating in physical activity a minimum of three days per week. Lower limb preference was determined by asking participants which leg they would use to kick a ball for maximum distance (right-preferred =12, left-preferred = 6). Participants reported no lower extremity injury that required surgery in the past year. The following protocol was approved by the Texas Christian University institutional review board prior to implementation and informed consent was obtained from all participants prior to data collection.
Participants completed two sets of 20 repetitions of double leg squats with one set performed at a preferred tempo (self-selected by each participant) while the other set was at a non-preferred tempo (metronome - 60 bpm; one second descent, one second ascent). Feet were positioned shoulder width apart and arms were extended overhead during the bodyweight squats. The order of squat tempo was randomized for each subject. During all squats, participants executed the movement to a depth that was comfortable for them and a researcher observed performance to ensure that participants maintained a similar depth for the set of 20 repetitions. During the repetitive squat movement, bilateral GRFv were collected with dual force plates (AMTI, Watertown, MA, USA) using a sampling rate of 100 Hz.
Kinetic data were filtered using a Butterworth filter and a 10 Hz cut-off frequency. A researcher manually identified each squat cycle in Visual 3D (C-Motion, Inc., Germantown, MD, USA) with initiation of right knee flexion indicating squat start and termination of right knee extension indicating squat end. The squat phases were then defined as the time from initiation of right knee flexion to maximum knee flexion (descent phase) and maximum knee flexion to termination of right knee extension (ascent phase). The GRFv peak and impulse were determined for the right and left legs for the ascent phase of each squat repetition since the peak GRF typically occurs during this phase.12 The variability of center of pressure trajectories in the anterior-posterior (AP) and medial-lateral (ML) directions for the preferred and non-preferred legs were computed by standard deviation for the entire duration of each trial.
The dependent variables (movement time, peak GRFv, Fimpulse, COP standard deviation – AP, COP standard deviation – ML) were analyzed in separate 2 (leg: preferred vs. non-preferred) x 2 (tempo) x 20 (repetition) repeated measures analysis of variance. Based on the sample size (n = 18), an alpha level set at p < 0.05, and an effect size set to 0.15, the current study achieved a level of statistical power equal to 0.84. Data are reported as mean ± standard deviation. All tests were performed using SPSS statistical software (IBM, Chicago, IL).
Results
Mean movement time was evaluated between the self-paced and metronome conditions through a one-way ANOVA and revealed a significant difference for movement time (F1,37 = 20.93, p < 0.001) with longer squat times for the self-paced (1.92 ± 0.27 s; 62.5 +1.85 bpm) compared to the metronome (1.82 ± 0.13 s; 65.93 ± 3.84 bpm) condition.
The analysis of peak GRFv revealed a significant tempo x leg interaction (F1,79 = 7.593, p = 0.006). Although individuals executed the squat movement with a greater peak GRFv during the self-paced (Preferred: 550.27 ± 172.15 N; Non-Preferred: 518.40 ± 134.19 N) than in the metronome (Preferred: 498.96 ± 115.93 N; Non-Preferred: 508.35 ± 130.08 N) condition for both legs (F1,79 = 14.48, p < 0.001), there were significantly larger peak GRFv values for the preferred limb compared to the non-preferred leg during the self-paced condition. No leg difference, repetition effect, or other interactions were found for peak GRFv (Figure 1, top panel).

There was also a significant tempo x leg interaction for Fimpulse (F1,79 = 5.927, p = 0.015), with preferred and non-preferred limbs performing differently depending upon the tempo condition. Post-hoc analysis revealed similar impulses for the preferred and non-preferred limbs during metronome condition (Preferred: 312.55 ± 70.81 Ns; Non-Preferred: 306.98 ± 78.68 Ns, p = 0.34), but significantly greater impulses for the non-preferred limb during the self-paced condition (Preferred: 300.4 ± 67.84 Ns; Non-Preferred: 314.91 ± 77.5 Ns, p < 0.001) – see Figure 1, bottom panel. No significant main effects or other interactions were found for Fimpulse (p > 0.05).
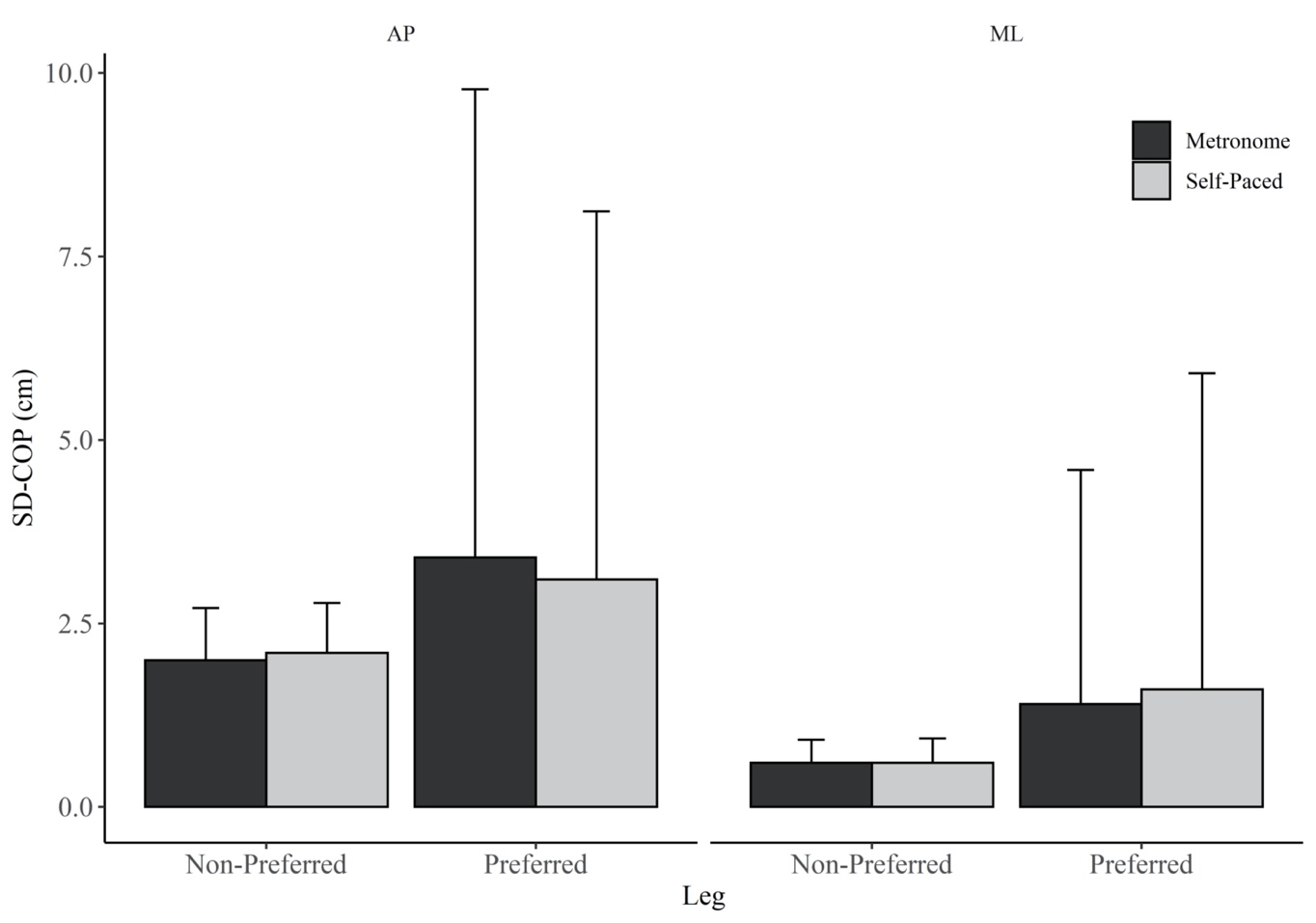
A significant main effect of limb was found on COP standard deviation in both the AP [F1,81 = 30.15, p < 0.001] and ML [F1,81 = 41.20, p < 0.001] directions with no other significant main effects or interactions (see Figure 2). In the AP direction, the preferred limb (3.21 ± 0.57 cm) showed greater variability than the non-preferred limb (1.92 ± 0.06 cm) with the same pattern of results observed in the ML direction (preferred: 1.50 ± 0.38 cm; non-preferred: 0.62 ± 0.3 cm).

Discussion
The current study evaluated the degree of (a)symmetry in a double leg squat as a function of squat tempo and repetition. The results revealed bilateral asymmetry for peak GRFv and Fimpulse dependent on squat tempo. Higher peak GRFv values were observed during self-paced squats compared to metronome-paced squats in both limbs. The preferred limb exhibited a greater difference in peak GRFv across tempo conditions, while the non-preferred showed similar values across tempos. Complimenting the asymmetrical kinetic GRF variables, the results also showed that the preferred limb exhibited greater COP variability in both AP and ML directions compared to the nonpreferred limb. These findings highlight the importance of evaluating the degree of limb symmetry across multiple levels of analysis and indicate a functional specialization exists within the lower extremities when considering force production and postural control properties.
At the GRF level of analysis, the between limb peak GRFv asymmetry finding during the squat task supports some previous evidence,13 while contrasting other results.14 During weighted back squats performed by college athletes Newton et al.13 reported significant bilateral differences in peak GRFv during the concentric phase of the movement with the dominant leg producing a greater peak force. However, when categorized by right and left leg, no significant difference in peak GRF was found between limbs, seemingly indicating limb symmetry.13 In a drop landing task, Schot, Bates, & Dufek14 qualitatively observed bilateral asymmetries in GRF peaks at the individual level but reported no significant limb differences when compared at the group level. In alignment with Newton and colleagues,13 the current study only considered the concentric phase of the squat. Consistent with their findings in a weighted back squat, the current results revealed that peak force asymmetries exist during bodyweight squat. However, Newton et al. categorized the dominant limb based on isokinetic strength testing and linked such strength differences to other functional asymmetries found in explosive movements. Here, preferred limb was identified using a footedness questionnaire which may exhibit differing characteristics than the asymmetric performance advantage (e.g., limb dominance, strength imbalances) observed previously. Future investigation is needed to better understand the connections between limb dominance and preference during the squat movement given that previous evidence has highlighted that injury and fatigue appear to induce greater degrees of lower limb asymmetries.3
The functional demands of the squat movement would appear to require symmetrical kinetic properties pertaining to force production, suggesting a lack of functional specialization between the lower limbs in healthy individuals. Bilateral asymmetries have been explored in a variety of motor tasks with the collective evidence failing to provide clear insight on the generality of interlimb performance characteristics. For example, an investigation of limb dominance, foot orientation, and functional asymmetry during normal gait resulted in significant differences between the dominant and non-dominant limb for medial and lateral peak GRF and impulses.15 In upright standing, some findings indicate that the dominant limb exhibits a performance advantage (e.g., less postural sway) over the non-dominant limb, whereas other findings typically show symmetrical postural sway between the limbs. Furthermore, motor tasks that demand asymmetrical roles (i.e., kicking, stepping on a box) between the limbs do appear to support the notion of asymmetrical control. The results of the current study suggest that the force production characteristics and postural control properties of the lower limbs in healthy individuals both reflect asymmetry but to varying degrees dependent on the tempo of the squat movement. For example, the contrasting findings between the two kinetic variables (GRF peak and impulse) suggest that further delineation may be needed between the control properties of the preferred and non-preferred limbs. A clear performance advantage for the preferred limb was observed in terms of producing peak force values during the self-paced condition of the squat movement. This advantage appears to be complemented by efficient force production in that lower impulses were produced compared to the non-preferred limb. Overall, these findings are consistent with the notion of functional specialization of the lower extremities in most motor tasks.16
The variation of movement tempo has been used frequently during walking and running tasks to understand potential shifts of lower limb symmetries.17,18 However, manipulation of tempo has received minimal consideration during bodyweight squats despite the relevance to rehabilitation approaches. Here, both the preferred and non-preferred limbs exhibited greater peak GRFv during self-paced bodyweight squats compared to squats executed in the metronome condition that was likely associated with an increased movement velocity.19 This pattern of results held true for the non-preferred limb when considering GRFimpulse but the preferred limb exhibited lower GRFimpulse during self-paced squats compared to the metronome condition. Understanding how tempo affects force production and variability, specifically during bodyweight squats, may have an impact on therapeutic exercise prescription as rehabilitation exercises are often performed at a self-selected pace. Here, smaller degrees of asymmetry were observed in the metronome condition compared to the self-paced condition. Promoting symmetrical characteristics is often a primary goal of rehabilitation for most lower limb injuries, and the use of a metronome may facilitate an individual’s ability to control the level of force production between the injured and non-injured limb.
The dynamic nature of bodyweight squats challenges the stabilization control of each leg, and the current findings revealed different postural solutions between the preferred and non-preferred leg not typically found in simple balance tasks.20–22 The reduced COP variability observed for the non-preferred as compared to preferred leg suggests an enhanced stabilization component for the non-preferred leg during the propulsion phase of this dynamic movement. Therefore, it appears that the non-preferred leg more effectively countered the mechanical perturbations of body movements, and this was consistent for both AP and ML directions. However, future investigations should consider not only pedal preferences8 but also training histories16 when interpreting bilateral asymmetries.
Another aim of the current investigation was to examine the potential interaction between two types of asymmetry (ground reaction forces and COP under each foot), which has received minimal study in the literature. Significant differences were observed between the lower limbs for the GRF properties, and the non-preferred limb showed significantly lower COP displacements than the preferred limb. Previous evidence has shown the dependent nature of weight distribution on COP displacements during upright standing. For example, Rougier22 showed that the more loaded limb exhibited larger displacements during unstable conditions, suggesting a compensatory strategy between the lower limbs in order to minimize whole body sway. Similarly, King, Wang and Newell8 revealed asymmetries that were dependent on weight distribution across different postural configurations (staggered and tandem stances). In the current study, the less stable preferred limb showed increased displacements in both the AP and ML directions. Thus, the reduced COP motion under the non-preferred limb may aid in limiting whole-body COP displacements in a manner that achieves postural stability in both directions during squat execution. Future examinations of the relative contribution of each limb (i.e., weight distribution) to whole-body COP movements would provide insight into the ability of the postural control system to accommodate such variable asymmetries.
While the current study did not directly examine the role of fatigue, it is important to consider the relative impact of fatigue on bilateral asymmetries. A lack of a significant repetition effect suggests that fatigue did not influence the measured bilateral asymmetries (peak GRFv, COP variability, or impulse – Fimpulse) during the bodyweight squat task within a healthy, active population. Interestingly, during five sets of eight repetitions of a weighted squat exercise, bilateral GRFv became more symmetric after participants were fatigued within one set, but this symmetrical behavior did not carry over between sets.12 Similar results of increased symmetry of load distribution and knee and hip joint loading patterns were observed within a patient population (anterior cruciate ligament reconstruction) during 10 consecutive bodyweight squats completed after a fatiguing protocol.3 The physical activity level of the participants may have mitigated the role of fatigue across the 20 squat cycles. Additionally, in contrast to typical fatigue protocols, the volume of workload used in the current study may have only resulted in a minor degree of fatigue, and future investigations should examine the process of fatigue onset with increased movement repetitions.
A few limitations of the current study need to be considered. First, the experimental instructions did not impose constraints on participants’ selection of the self-paced tempo to be faster or slower than the metronome-paced tempo, and future investigations should consider individualizing the metronome tempo by manipulating a self-paced tempo by a percentage value. Second, it may be important for future investigations to consider sport-specific training that may influence bilateral asymmetries. Lastly, pedal asymmetry developed through the bilateral or unilateral nature of a sport potentially further contributes to differences in pedal asymmetry.23
Conclusion
The double leg squat, in either a bodyweight or weighted condition, represents a foundational movement pattern used in most sport training programs and is highly fundamental to rehabilitation environments. While asymmetries in ground reaction forces tend to be minimized through certain training approaches, the observed functional differences of the recorded kinetic properties in the current study indicate that traditional notions of symmetry may not hold true, even within a population of healthy individuals. While these results add to the existing literature, further work is needed to fully understand the impact of tempo, sport training, and fatigue on the functional outcomes associated with the double leg squat, as it is a frequently-used exercise in rehabilitation and athletic settings. Coaches and practitioners need to consider this preferential use of the right and left legs when developing strength training exercises and sport-specific drills in order to maximize overall task performance for these athletes.
Conflicts of interest
The authors certify that there is no conflict of interest with any financial organization regarding the material discussed in the manuscript.